








О том, насколько перспективно данное новшество в рамках создания ходовых частей для боевых машин, Морозов вместе с соавторами описал в статье «Вестника бронетанковой техники», датированной 1989 годом. Материал весьма интересен для ознакомления, поэтому мы и публикуем его здесь.
Перспективы двухобводного движителя для ВГМ
От редколлегии.
Авторы рассматривают возможность использования двухобводного гусеничного движителя для различных ВГМ (в том числе для основного танка), уделяя главное внимание предполагаемым преимуществам. Однако при использовании двухобводного движителя могут возникать проблемы, связанные с увеличением массы ходовой части, ухудшением подвижности (особенно поворотливости), усложнением трансмиссии и системы управления движением, а также увеличением потерь мощности.
Для всесторонней оценки двухобводного движителя целесообразно проведение дальнейших исследований. Вместе с тем редколлегия сочла возможной публикацию статьи с целью привлечения внимания специалистов к предлагаемой схеме движителя для определения области его применения.
Поиск путей существенного улучшения подвижности ВГМ привел к необходимости исследования потенциальных возможностей двухобводного движителя. Одной из причин, вызвавших внимание к этому направлению, является тенденция увеличения массы совершенствуемых ВГМ, числа их опорных катков, длины опорной поверхности, что привело к соответствующему увеличению длины гусеничного обвода: за послевоенный период с 11…13 до 14…15 м.
Последствия увеличения длины гусеничного обвода известны и хорошо изучены. Одно из них – рост вероятности сброса гусеницы, в особенности в тяжелых условиях эксплуатации. Основной способ борьбы с этим явлением – увеличение усилия предварительного натяжения гусеницы, приводящее к повышенным потерям в гусеничном обводе. Компромиссным решением является поддержание приемлемого усилия за счет автоматического натяжения гусеницы, что значительно усложняет конструкцию.
Проблемой является также защита гусеницы от воздействия противотанковых мин и других средств поражения, что подтверждается значительными потерями ВГМ при подрыве на минах. Дополнительный гусеничный обвод является не только средством предотвращения сброса гусеницы, но и обеспечения живучести ВГМ (при условии возрастающей роли минирования), поскольку, используя его, машина могла бы самостоятельно уйти в укрытие для восстановления ходовой части.
Двухобводный движитель расширяет возможности компоновочных и конструктивных решений при создании танков и других типов ВГМ.
Так, монообводная ходовая часть предполагает только переднее или заднее месторасположение ведущих колес, вследствие чего и существуют два компоновочных решения танков и других ВГМ – с передним или задним расположением моторнотрансмиссионного отделения (МТО). Поэтому и поиск оптимального компоновочного решения ВГМ и семейства машин на ее базе заключается в выборе варианта месторасположения МТО.
С другой стороны, явно выраженное стремление увеличить мощность силовой установки требует обеспечения приемлемой экономичности ее работы в более широком диапазоне изменения коэффициента загрузки двигателя. Рост мощностей силовой установки в основном связан с необходимостью повышения так называемой тактической подвижности ВГМ, которая во многом определяет ее живучесть на поле боя и способность преодолевать искусственные препятствия.
При совершении марша, наоборот, в основном требуется хорошая топливная экономичность силовой установки, а достаточная удельная мощность, хотя и необходима, но ее рост, начиная с определенного уровня, на скорость в колонне почти не влияет. Решить эту проблему невозможно путем создания силовой установки с двумя уровнями мощности при одинаковой экономичности или созданием силовой установки с двумя двигателями. И тогда необходимо иметь два независимых подвода мощности к движителю в любом месте по длине машины, например, в середине шасси.
Все перечисленные требования невозможно выполнить при традиционной компоновке ВГМ с монообводным движителем, но им достаточно полно удовлетворяет двухобводная схема ходовой части (рис. 1).
К ее особенностям могут быть отнесены:
– полная зеркальная симметричность обводов, которая принципиально позволяет создать реверсивное транспортное средство, способное при необходимости быстро менять направление движения на противоположное;
– возможность раздельного подвода мощности к гусеничным обводам в центральной части машины, что позволяет за счет конструктивного исполнения трансмиссии и системы управления осуществить различные варианты привода, а именно:
а) привод на любой из обводов от одной (маршевой) силовой установки в легких дорожных условиях;
б) привод на каждый обвод от «своей» силовой установки;
в) комбинированный привод на любой обвод суммарной мощности от обеих силовых установок.
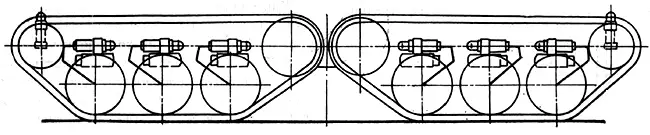
Рис. 1. Схема двухобводной ходовой части
Анализ путей более полной реализации свойств двухобводной ходовой части для повышения характеристик вооружения и защиты обнаружил целесообразность сочетания с ней управляемой гидропневматической подвески, которая позволит изменить в нужных случаях клиренс и дифферент ВГМ. Двухобводная ходовая часть с гидропневматической подвеской открывает широкие перспективы для поиска новых нетрадиционных компоновочных решений по танку и может способствовать созданию комплекса средств поддержки, обслуживания и сопровождения на его базе.
Работы, проведенные в отрасли ранее, подтвердили возможность реализации ходовой части с двухобводным движителем в ВГМ вспомогательного назначения. В частности, экспериментально установлено, что двухобводная схема ходовой части обеспечивает:
– значительно более высокую устойчивость гусениц в обводах;
– снижение в 5–10 раз усилий предварительного натяжения гусениц;
– более равномерное распределение давления на грунт опорных катков (за счет снижения тяговых усилий, действующих на крайние катки);
– повышение плавности хода;
– возможность резервирования подвижности при потере гусеницы, поскольку сохраняется способность движения и управления на бетоне и грунтовой дороге оставшимся неповрежденным обводом.
Кроме того, двухобводная ходовая часть, вероятно, позволит снизить нагруженность элементов зацепления и шарниров гусениц за счет разделения тяговых усилий на ведущих колесах и улучшить тягово-сцепные свойства ВГМ за счет разделения потоков мощности и возможности кинематического рассогласования обводов.
Особый интерес, с точки зрения повышения эргономических характеристик и точности стрельбы, представляет влияние двухобводного движителя с гидропневматической подвеской на плавность хода, в первую очередь обусловленное положением центра масс машины. Очевидно, что при равных значениях давления в упругих элементах всех гидропневматических подвесок (что является желательным в процессах производства и эксплуатации), а также одинаковой выставке опорных катков корпус машины не будет иметь дифферента лишь в случае расположения центра масс в плоскости симметрии обводов, что, видимо, практически осуществить невозможно. Поэтому необходимо определить зону смещения центра масс в продольном направлении, приемлемого с точки зрения его влияния на статическое положение корпуса машины, нагруженность опорных катков, подвесок и на плавность хода.
Задача решалась с помощью математической модели движения по неровностям обычной ВГМ с монообводным движителем, включающей математическую модель опытной двухступенчатой гидропневматической подвески. Указанные модели были экспериментально проверены и уточнены.
Несовпадение расчетных и экспериментальных данных в среднем составило: для модели подвески – 10…15 %, для модели ВГМ – 15…20 %, что допустимо при решении практических задач. При расчетах ВГМ с двухобводным движителем было учтено влияние натяжения гусеницы на реакцию грунта под третьим и четвертым опорными катками, а также нетрадиционной кинематики последних трех подвесок, балансиры которых повернуты навстречу движению машины.
Результаты расчета (рис. 2) показали, что максимально допустимым при принятом заправочном давлении является смещение центра масс, не превышающее 400 мм.
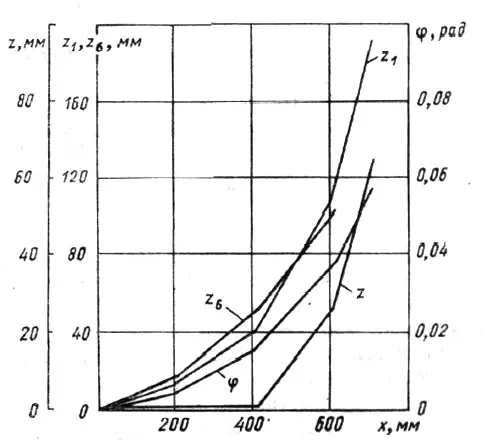
Рис. 2. Зависимость продольно-углового (φ) и вертикального (z) перемещений корпуса ВГМ, а также хода крайних опорных катков (z1, z6) от горизонтального смещения центра масс x (направление z, z6 противоположно и φ)
Плавность хода ВГМ с двухобводным движителем в зоне допустимого смещения центра масс оценивалась путем построения скоростных характеристик движения по синусоидальному профилю с расстоянием между вершинами неровностей, равным двойной длине опорной поверхности гусеницы: определялась проходная высота неровностей по допустимому вертикальному ускорению (3 g) и по касаниям балансирами ограничителей хода опорных катков (рис. 3).
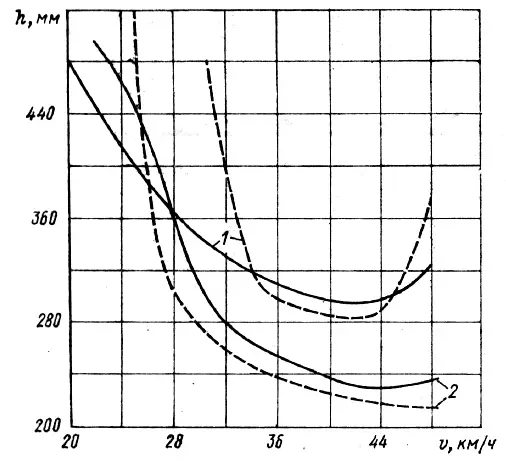
Как видно из представленных зависимостей, гусеничная машина с гидропневматической подвеской, у которой динамический ход опорных катков достигает 350 мм, имеет хорошую плавность хода: минимальная высота неровностей, преодолеваемых при движении со скоростью 35…45 км/ч, составляет 290…230 мм в соответствии со смещением центра масс в расчетных пределах (0…400 мм).
Некоторое ухудшение плавности хода при смещении центра масс объясняется уменьшением динамического хода первых подвесок (на 50 мм) и соответствующим изменением динамического и статического ходов остальных подвесок. Полученные данные свидетельствуют о целесообразности проведения теоретических исследований, необходимых для использования двухобводной ходовой части для ВГМ.
Вывод: использование двухобводного движителя для ВГМ может быть одним из направлений развития гусеничных машин, способствующим расширению их компоновочных возможностей с целью повышения основных свойств.
Источник:
В. В. Дущенко, А. И. Мазуренко, Е. А. Морозов. Возможный вариант нетрадиционной компоновочной схемы танка / В. В. Дущенко, А. И. Мазуренко, Е. А. Морозов // Вестник бронетанковой техники. – 1989. – № 4.




Нет Комментариев